Above is my first working simulation in week 3, we can see big progress in work, the robot got few new options:
Scanners ultrasonic
object avoidance
Problems:
My code from last week in which one I said that I can specify from which set of feet I will start, is good but it starts to move the robot to one side, so to compensate that I use alternating leg movement(Start from (1,3,5) then do the same by using(2,4,6))
Another problem was with reading sensors it’s hard to find out how far sensors should reach and how big cone should be.
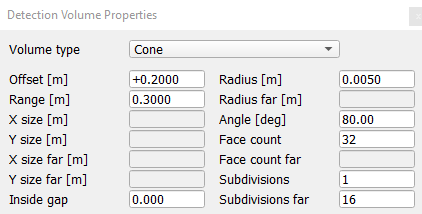
Offset -> How far away it starts
Range -> How far it ends
Angle -> From left to right
Another one was about object avoidance, the robot will go forward if nothing is detected, but sometimes we want to go to left like here:
We don’t detect anything but if we go forward we detect wall on the left side which I set to move robot backward, so if we go forward robot will detect wall go back and so on.
I create for this situation some kind of memory, array in which one I specify what was the position of two last objects. If it was in front and on the left then go left otherwise forward.
Progress:
The robot is moving in a sensible way. There are many ways to bug it because we don’t have goal yet. Also in this scenario, walls are mostly connected and there are no hills.
Next week:
The short document still need some adjustments. Next week I will probably create a kind of map system, to keep track of where we start and where are the objects, also I will set the first goal.
